TEST BENCHES
You require assistance with a complicated problem or need to solve a certain research question?

TEST BENCHES
You require assistance with a complicated problem or need to solve a certain research question?
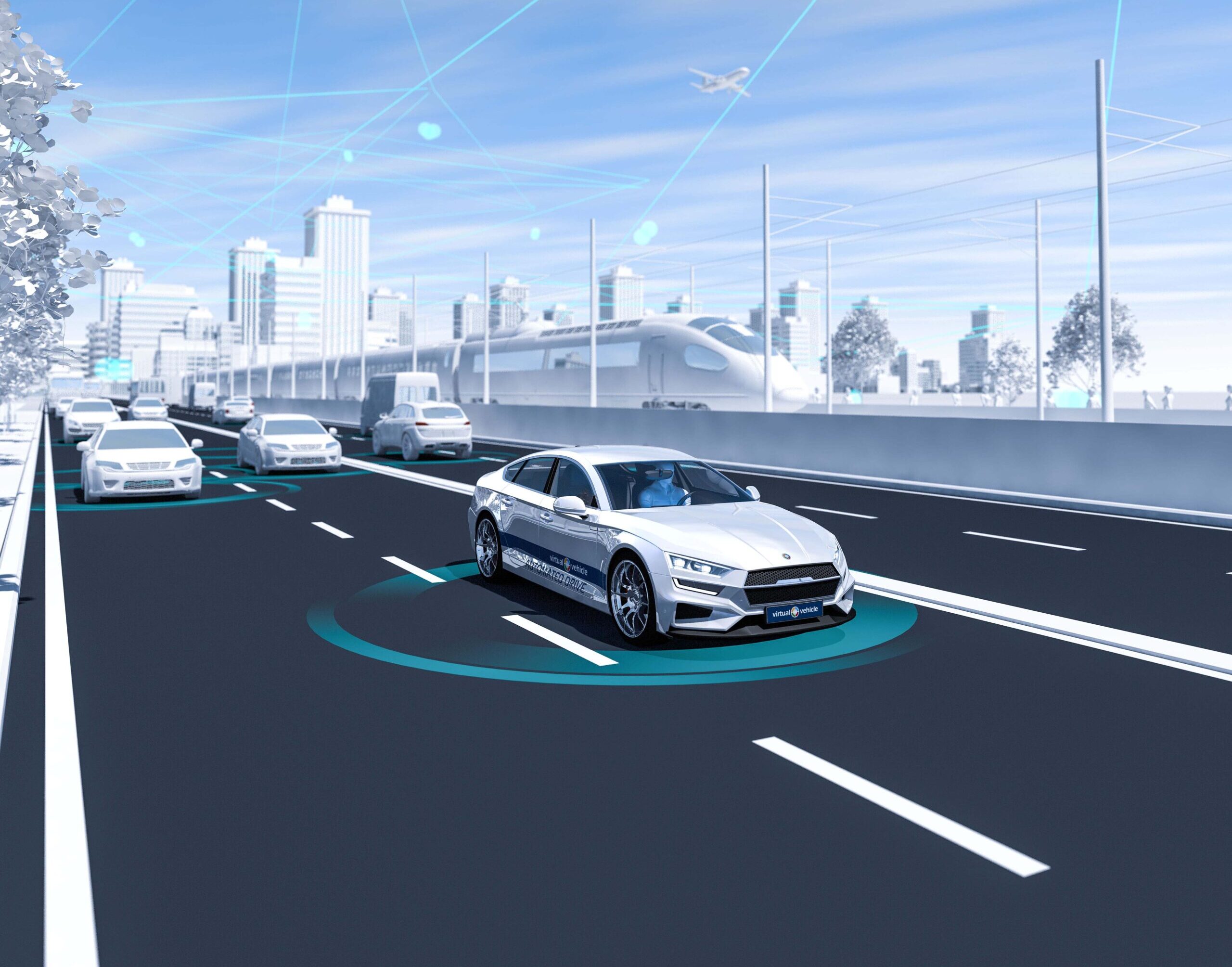
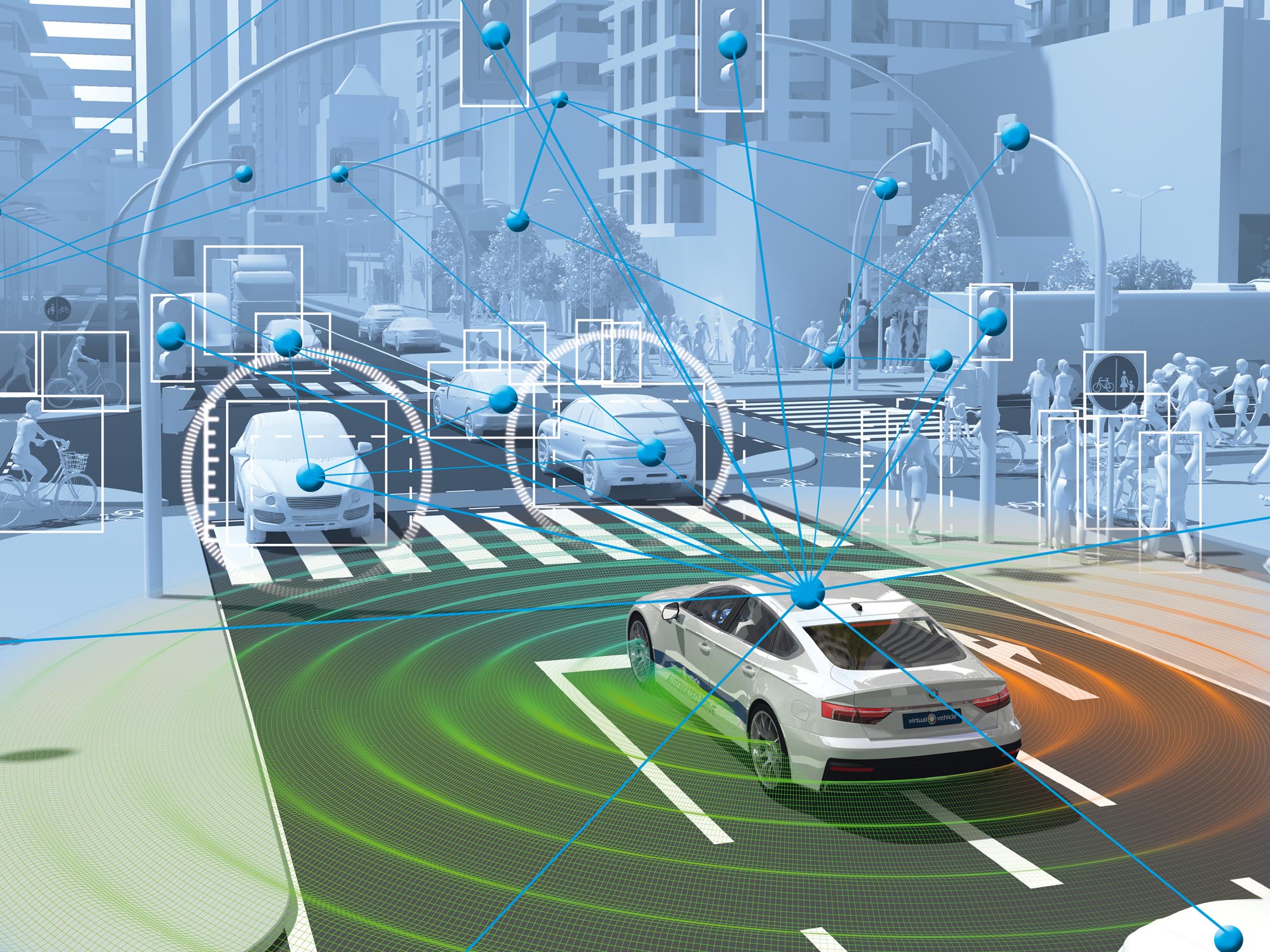
Cooperative, Networked, Automated Mobility
How We Support Our Customers

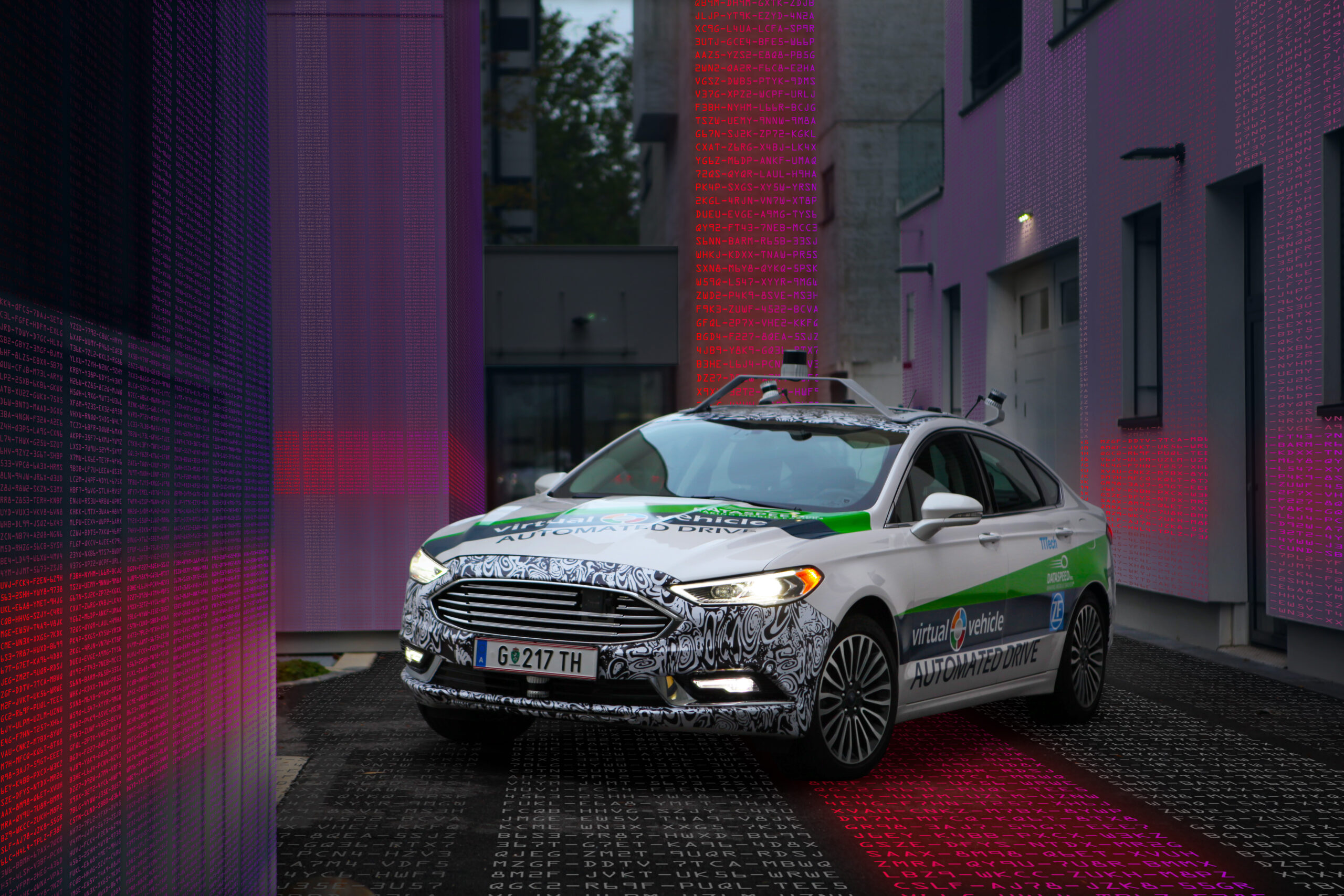
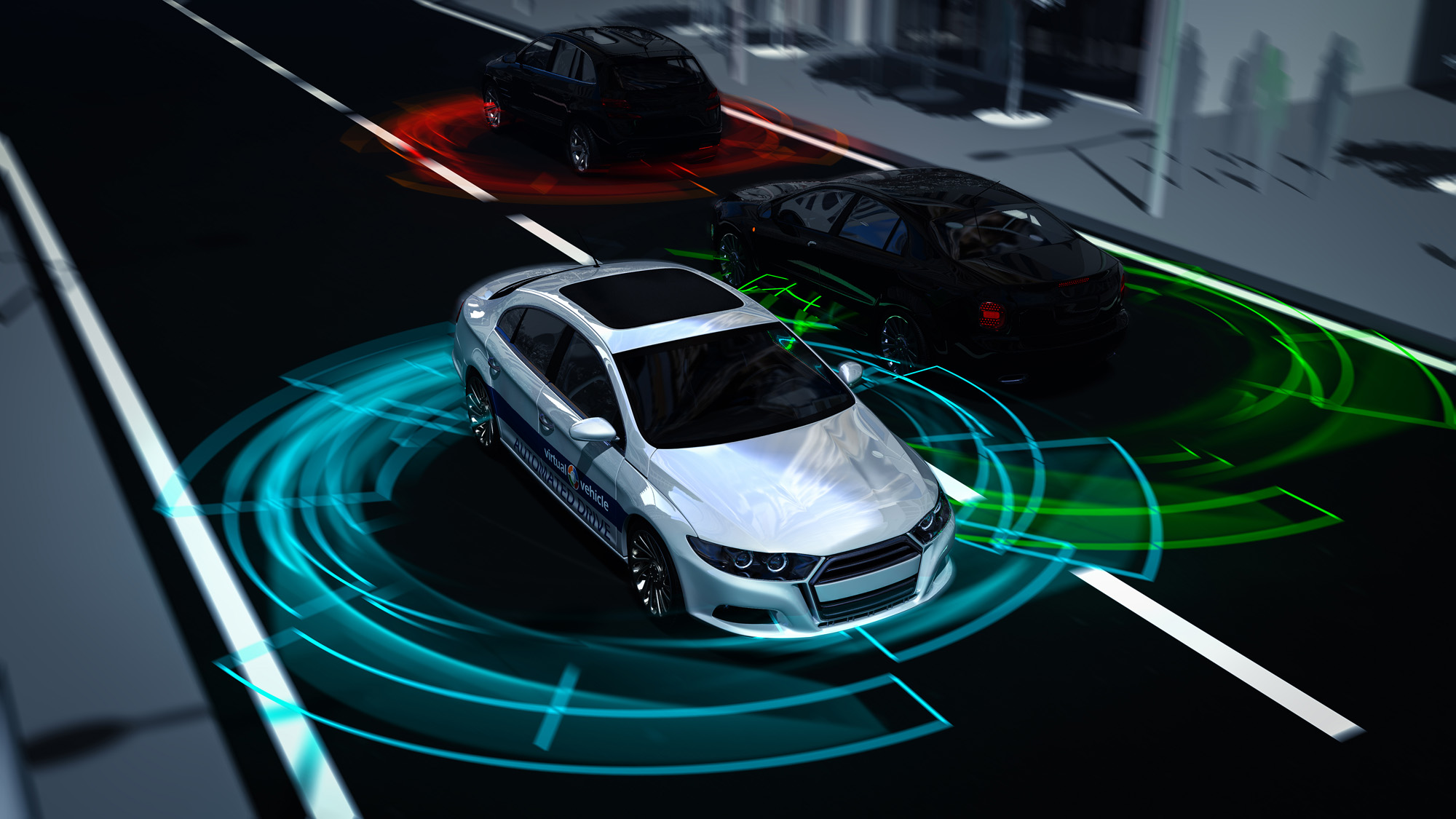
Automated Drive Demonstrator
Performance tests and validation on public roads and test tracks
Definition of use cases and test plans
Traffic simulations
Connectivity via mobile and V2X
Open Vehicle Development Platform
Integration and evaluation of functions (perception, planning, control, localization, etc.)
Provision of automated driving functions
Digital twin of the vehicle for different simulation environments
CI/CD pipeline for efficient development
AD Sensor Integration
Provision of sensor and vehicle data
Algorithm development
Sensor fusion
Reference measurement sensors
Automated Drive Demonstrator
With our test vehicle, the Automated Drive Demonstrator, we explore various methods of autonomous driving. State-of-the-art sensor technology is used to enable a 360-degree view.
Additionally, we have developed algorithms and “Embedded Intelligence” to test various functions of autonomous driving.
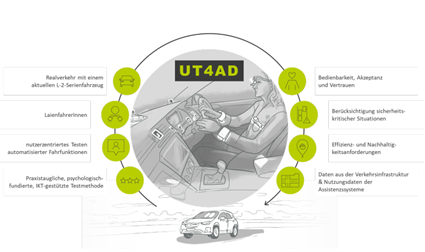
Trust in Automated Driving
In addition to technical feasibility, the human factor also plays an important role. We study why drivers might hesitate to let go of control of their vehicles, and we take this into account in our research.
Lidar Sensor Technology
Lidar, abbreviated for Light Detection and Ranging, is a remote sensing technology that uses laser light to measure distances and create detailed three-dimensional maps of the surroundings.
Applications in autonomous driving include:

Car-2Car Communication
We test this so-called Car-2-Car communication with our autonomous test vehicles. In “Car2Car,” vehicles inform each other about their route to avoid collisions and optimize their own route. They also warn each other about traffic jams and hazards like black ice.
Vehicle-to-Infrastructure Communication
Vehicle-to-Infrastructure (V2I) communication refers to the exchange of information between vehicles and surrounding infrastructure elements such as traffic lights, road signs, and other transportation systems.
V2I-communication is crucial for autonomous vehicles as it provides real-time information about road conditions, traffic, and the status of infrastructure.
This helps autonomous vehicles navigate safely and efficiently through complex environments.